Contemporary automation systems are designed to be faster, smarter, and even smaller than ever before. The design of the gripping mechanism in manufacturing environments where robots do repetitive pick-and-place tasks is a highly important factor. The gripping solution should be reliable, preferably allowing it to handle the components, keep them in the correct position, and move them easily to the next step of production.
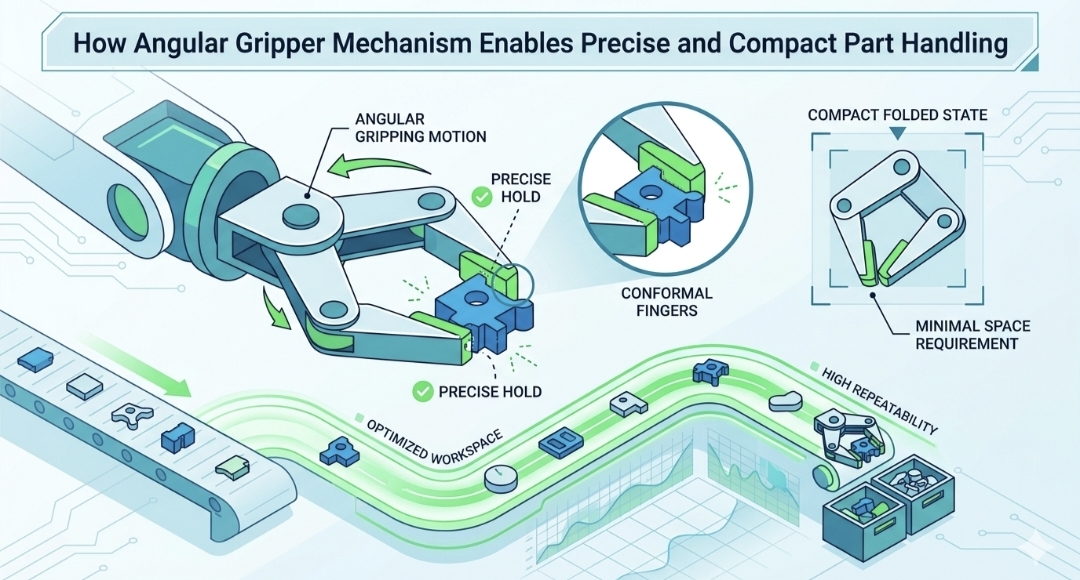
It is here that the angular gripper will become increasingly important in robot automation. Its compact structure enables very precise robot motion in a limited space, without a complicated grip solution as in many traditional gripping solutions. The angular gripper mechanism is uniquely designed to enable the gripper fingers to open and close through pivoting; as a result, it can be configured to suit a wide range of industrial applications.
Understanding the principles of operation of angular grippers and the reasons why they are so popular in automation can help explain why they are so significant in new manufacturing.
What Is an Angular Gripper?
An angular gripper is any robotic end-effector that grips and releases objects through the action of pivoting and/or rotating fingers. In contrast to parallel grippers, the fingers of an angular gripper move in a straight line.
The pivoting action enables the gripper to expand to a wide position, despite its small body. Due to this construction, angular grippers are frequently employed in processes where the room around the robot arm is tight. An outline angular gripper has several significant components.
- A mechanical housing that supports the mechanism
- Rotating gripper fingers
- A drive system that moves the fingers
- Mounting components that connect the gripper to the robot
Together, these components form a reliable gripping system capable of handling parts with both speed and accuracy.
How Does the Angular Gripper Mechanism Work?
The angular gripper mechanism converts linear motion into rotational motion. In most cases, a pneumatic actuator or mechanical linkage inside the gripper produces the movement required to rotate the fingers. The basic operating process is fairly straightforward.
- Compressed air or mechanical force activates the internal actuator.
- The actuator moves a piston or linkage inside the gripper.
- The motion is transferred to the pivoting gripper fingers.
- The fingers rotate inward to grip the workpiece.
When the force is released or reversed, the fingers rotate outward and let go of the object. This rotating action allows the gripper to provide a wide gripping range while keeping the overall device compact. The design is particularly useful in robotic systems where efficient motion and limited installation space are important factors.
Why Is Part Handling Important in Automation?
Part handling is a fundamental activity in industrial automation. Robots constantly move parts between machines, conveyors, inspection stations, and packaging systems. The reliability of these movements depends largely on the effectiveness of the gripping system used. If the gripping device fails to securely hold a part, several problems may occur.
- Parts may slip or drop during movement.
- Robots may lose cycle time due to handling errors.
- Delicate components may be damaged.
- Production lines may stop due to part misplacement.
A properly designed gripping system ensures that parts are held firmly while still allowing quick release when needed. Angular grippers help achieve this balance by combining precise movement with efficient design.
What Makes Angular Grippers Compact and Efficient?
One of the biggest advantages of an angular gripper is its compact structure. The pivoting motion of the fingers allows the gripper to achieve a large opening angle without requiring large linear travel. This design offers several practical benefits.
- Less installation space is required for the robot arm.
- Greater flexibility when working in confined areas
- Improved accessibility around complex workpieces
Because the gripper fingers rotate rather than slide, the overall mechanism can remain small while still delivering effective gripping capability. This makes angular grippers especially useful in automation cells where robots must operate within tight machine layouts.
Pneumatic Angular Gripper: How It Improves Performance
The pneumatic angular gripper is the most frequently used design in most automation processes. This form of gripper is operated by compressed air to produce the force required to act upon the fingers of the gripper.
Pneumatic systems are commonly used in manufacturing because they are easy to implement, reliable, and provide a strong actuation force. The pneumatic angular gripper is normally operated in the following steps.
- Compressed air enters the gripper cylinder.
- Air pressure moves the internal piston.
- The piston activates the angular linkage mechanism.
- The gripper fingers rotate to grip the part.
The fingers restore to their initial position when air pressure is either reversed or released. Since pneumatic systems are fast-responding, a pneumatic angular gripper can make quick gripping and releasing moves, a feature that helps ensure fast production cycles.
Angular Gripper vs Radial Gripper
Angular and radial grippers both belong to robotic automation, but their mode of operation are different. A radial gripper is a form of gripping in which fingers are gripping along a circle or rotating about a central axis. Although radial motion can provide good gripping power, the mechanism can take up more space, depending on its design.
Angular grippers, on the other hand, use pivoting fingers that rotate inward or outward to grip the object. This motion often allows a more compact body design. Differences between angular and radial grippers include
- Angular grippers provide wider opening angles in smaller spaces.
- Radial grippers may offer different gripping geometries.
- Angular mechanisms are often simpler and lighter.
- Radial designs may be used for specific, specialised applications.
In many automation setups that require compact installation and fast motion, the angular gripper mechanism is the preferred option.
Advantages of Angular Gripper Mechanisms
The popularity of angular grippers in industrial automation comes from several key advantages.
- Compact structure that fits easily on robotic arms
- Wide opening angle for handling different part sizes
- Fast gripping and releasing motion.
- Reliable mechanical design with fewer complex components
- Suitable for both light and medium-duty part handling
Because of these advantages, angular grippers are widely used in automated assembly and handling processes.
Industries That Use Angular Grippers
The angular gripper has become a common component in various manufacturing industries.
- Automotive manufacturing: Robots equipped with angular grippers handle small mechanical components, fasteners, and other parts during assembly.
- Electronics manufacturing: Delicate electronic components require careful handling. Compact grippers help robots operate in tight spaces without damaging parts.
- Packaging industry: Robots use angular grippers to pick and place packaged goods, cartons, or containers at high speeds in production lines.
- Metalworking industry: Angular grippers are often used to load and unload parts from machining centres.
In each of these industries, the angular gripper mechanism’s ability to handle parts efficiently improves overall automation performance.
How Angular Grippers Improve Automation Efficiency
Automation efficiency depends on speed, reliability, and consistency. A well-designed gripping system contributes to all three. Angular grippers help improve efficiency in several ways.
- Faster gripping cycles reduce handling time.
- Compact design allows better robot movement.
- Reliable part handling reduces errors.
- Simpler mechanisms require less maintenance.
These factors make angular grippers suitable for automated systems that operate continuously in industrial production environments.
Future Developments in Gripping Systems
As automation technology evolves, gripper designs continue to improve. Engineers are developing new gripping solutions that combine precision, flexibility, and intelligent control. Modern gripping systems may include features such as
- Integrated sensors that detect gripping force.
- Lightweight materials for improved robot efficiency.
- Advanced pneumatic control systems.
- Compact designs optimised for collaborative robots.
These innovations allow gripping systems to adapt to increasingly complex manufacturing tasks. Angular grippers will likely remain an important part of these developments due to their efficient design and reliable performance.
Conclusion
When manufacturing is automated, part handling is guaranteed to be reliable, ensuring the efficiency of production. The angular gripper provides a convenient way to grip and transfer parts with high precision and has a small footprint. The angular gripper mechanism is a unique design that enables one to pivot fingers over a wide range of grip and utilizes minimal installation space. The pneumatic angular gripper is used with pneumatic actuation to deliver high-speed, accurate performance across a wide range of automation applications.
Angular grippers are significant in current robotics and industrial automation, whether through a program that combines a radial gripper or as a component of a system. Angular grippers can assist manufacturers in enhancing the productivity and precision of modern manufacturing processes by enabling powerful, small, and precise part handling.


